 |
|
Funciones que usan Pds::Matrix, Ejemplo: Pds::Gabor(), Pds::qGabor(), etc. Más...
Namespaces | |
| namespace | Pds |
| Nombre de espacio para Pds (Procesamiento Digital de Senales) | |
funciones con matrices con kernels | |
Descripción de algunos kernels que usan Pds::Matrix. | |
| Pds::Matrix | Pds::Kernel2D::Gaussian (unsigned int k, double Sigma=1.0) |
| Retorna un filtro Gaussiano discreto. Más... | |
| double | Pds::Kernel2D::GaussianSigmaFit (unsigned int rm, unsigned int r) |
Retorna o valor  de un filtro Gaussiano discreto. de un filtro Gaussiano discreto. Más... | |
| Pds::Matrix | Pds::Kernel2D::GaussianDiff (unsigned int k, double Sigma1=1.0, double Sigma2=1.2) |
| Retorna un filtro diferencia de Gaussiano discreto. Más... | |
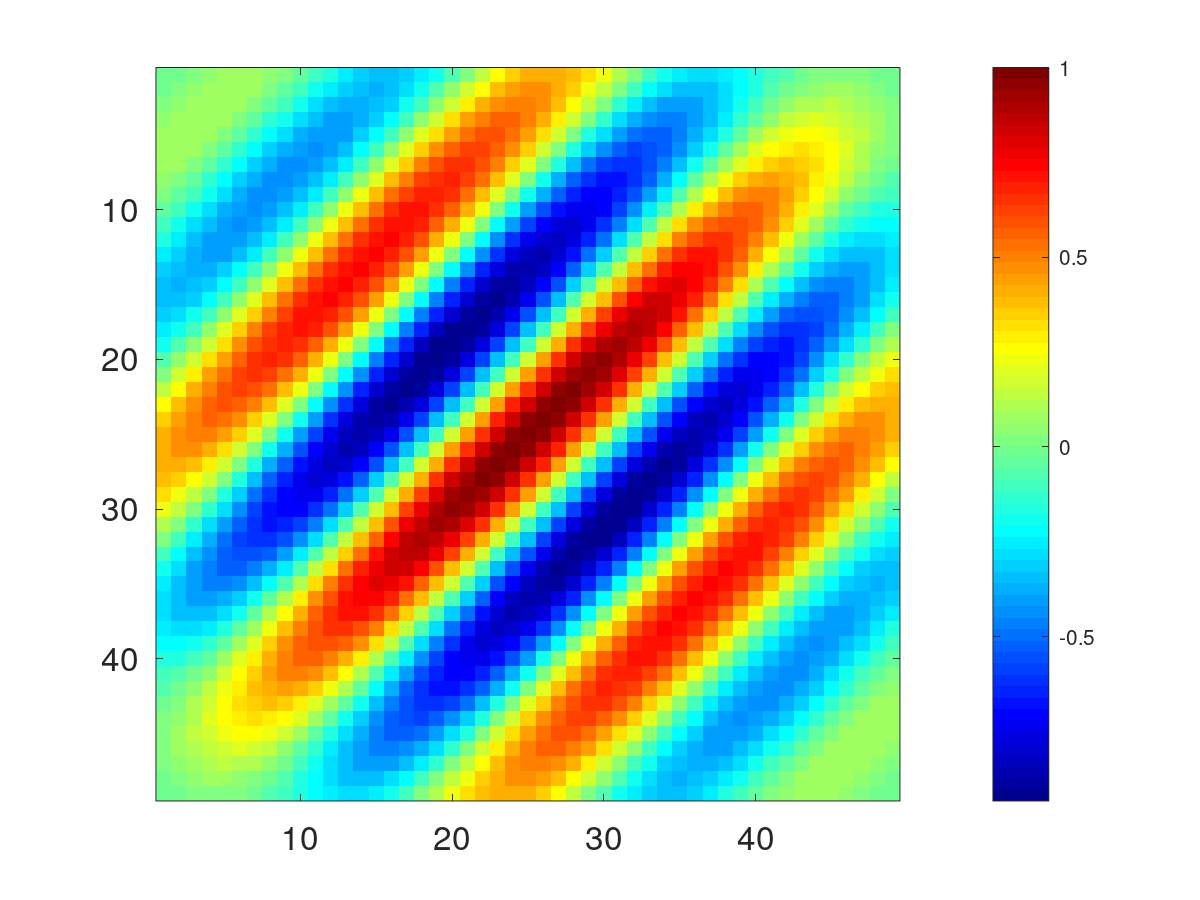
| Pds::Matrix | Pds::Kernel2D::Gabor (unsigned int L, double Vmax=6.0, double Sigma=5.5, double Theta=Pds::Ra::Pi/4, double Lambda=4.0, double Psi=0.0) |
| Retorna un kernel Gabor. Más... | |
| Pds::Matrix | Pds::Kernel2D::qGabor (unsigned int L, double Vmax=6.0, double q=0.1, double Sigma=5.5, double Theta=Pds::Ra::Pi/4, double Lambda=4.0, double Psi=0) |
| Retorna un kernel qGabor. Más... | |
| Pds::Matrix | Pds::Kernel2D::SobelH (void) |
| Retorna un kernel Sobel horizontal ([4] pp. 126). Más... | |
| Pds::Matrix | Pds::Kernel2D::SobelV (void) |
| Retorna un kernel Sobel vertical ([4] pp. 126). Más... | |
| Pds::Matrix | Pds::Kernel2D::PrewittH (void) |
| Retorna un kernel Prewitt horizontal ([4] pp. 121-122). Más... | |
| Pds::Matrix | Pds::Kernel2D::PrewittV (void) |
| Retorna un kernel Prewitt vertical ([4] pp. 121-122). Más... | |
| Pds::Matrix | Pds::Kernel2D::Laplacian5P (void) |
| Retorna un operador Laplace discreto. Más... | |
| Pds::Matrix | Pds::Kernel2D::Laplacian9P (void) |
| Retorna un operador Laplace discreto. Más... | |
| Pds::Matrix | Pds::Kernel2D::Mean (unsigned int L) |
| Retorna un kernel Mean. Más... | |
Funciones que usan Pds::Matrix, Ejemplo: Pds::Gabor(), Pds::qGabor(), etc.
Estas funciones trabajan con una matriz de la forma.
![\[
\mathbf{A}=\left(\begin{matrix}
a_{00} & a_{01} & \cdots & a_{0(Ncol-1)}\\
a_{10} & a_{11} & \cdots & a_{1(Ncol-1)}\\
\vdots & \vdots & \vdots & \vdots \\
a_{(Nlin-2)0} & a_{(Nlin-2)1} & \cdots & a_{(Nlin-2)(Ncol-1)}\\
a_{(Nlin-1)0} & a_{(Nlin-1)1} & \cdots & a_{(Nlin-1)(Ncol-1)}\\
\end{matrix}\right)
\]](form_107.png)
![\[
A\equiv [a_{i,j}]
\]](form_108.png)
nlin es el número de lineas y ncol es el número de columnas.
Informacion adicional puede ser encontrada en [5]
| Pds::Matrix Pds::Kernel2D::Gaussian | ( | unsigned int | k, |
| double | Sigma = 1.0 |
||
| ) |
Retorna un filtro Gaussiano discreto.
![\[
G_{ij}=
\frac{exp{\left(-{\frac {(i-k)^{2}+(j-k)^{2}}{2\sigma ^{2}}}\right)}}{2\pi \sigma ^{2}} ;
0\leq i,j< (2k+1)
\]](form_187.png)
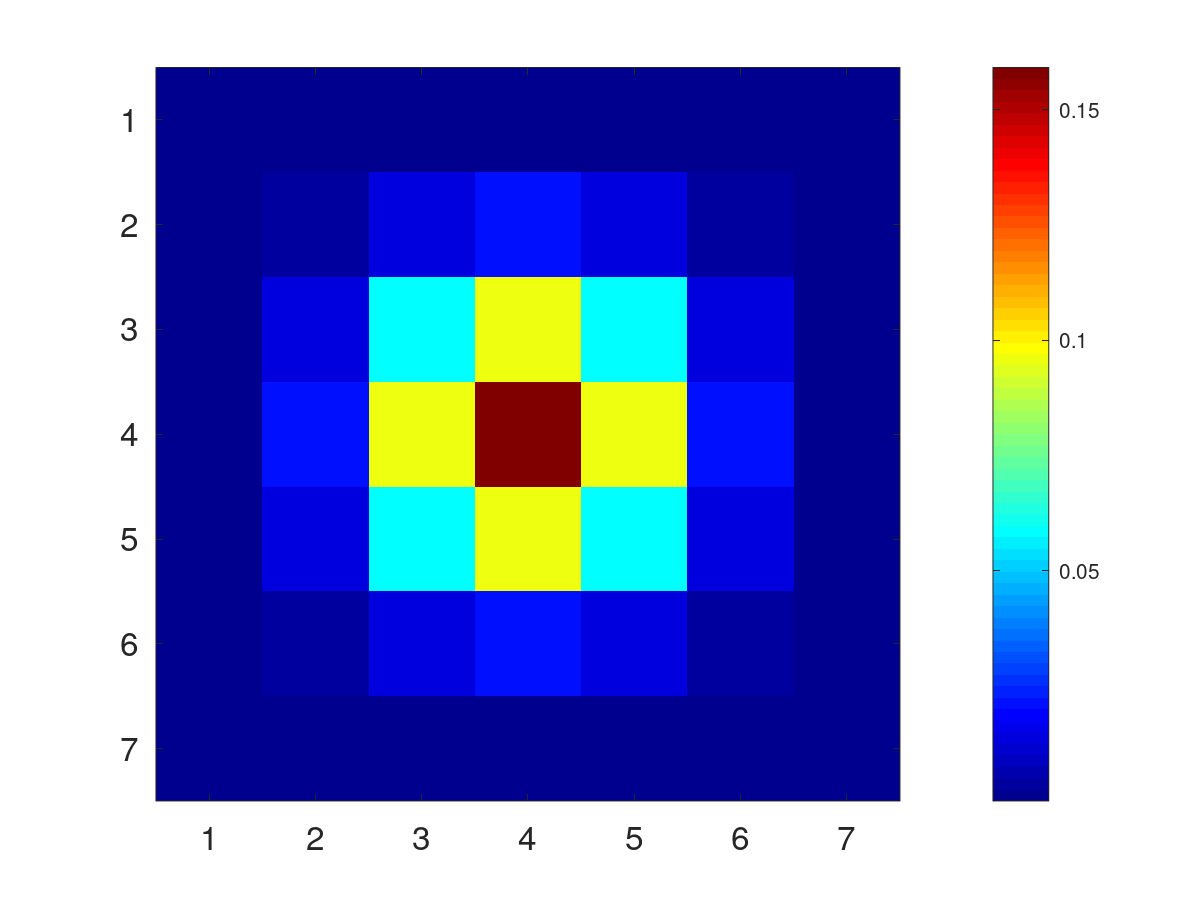
Pds::Matrix Kernel=Pds::Kernel2D::Gaussian(3);
| [in] | k | Valor para formar el tamaño del filtro  . . |
| [in] | Sigma | parámetro del filtro gaussiano. |
| double Pds::Kernel2D::GaussianSigmaFit | ( | unsigned int | rm, |
| unsigned int | r | ||
| ) |
Retorna o valor de un filtro Gaussiano discreto.
![\[
\mathbf{G}=
\begin{bmatrix}
g(-r,-r) & \dots & g(-1,-r) & g(0,-r) & g(1,-r)& \dots & g(r,-r) \\
\vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\
g(-r,-1) & \dots & g(-1,-1) & g(0,-1) & g(1,-1) & \dots & g(r,-1) \\
g(-r,0) & \dots & g(-1,0) & g(0,0) & g(1,0) & \dots & g(r,0) \\
g(-r,1) & \dots & g(-1,1) & g(0,1) & g(1,1) & \dots & g(r,1) \\
\vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\
g(-r,r) & \dots & g(-1,r) & g(0,r) & g(1,r) & \dots & g(r,r) \\
\end{bmatrix}
\]](form_190.png)
![\[
g(i,j)=
\frac{exp{\left(-{\frac {i^{2}+j^{2}}{2\sigma ^{2}}}\right)}}{2\pi \sigma ^{2}} ;
-r\leq i,j\leq r
\]](form_191.png)
De modo que  tiene radio
tiene radio  .
.
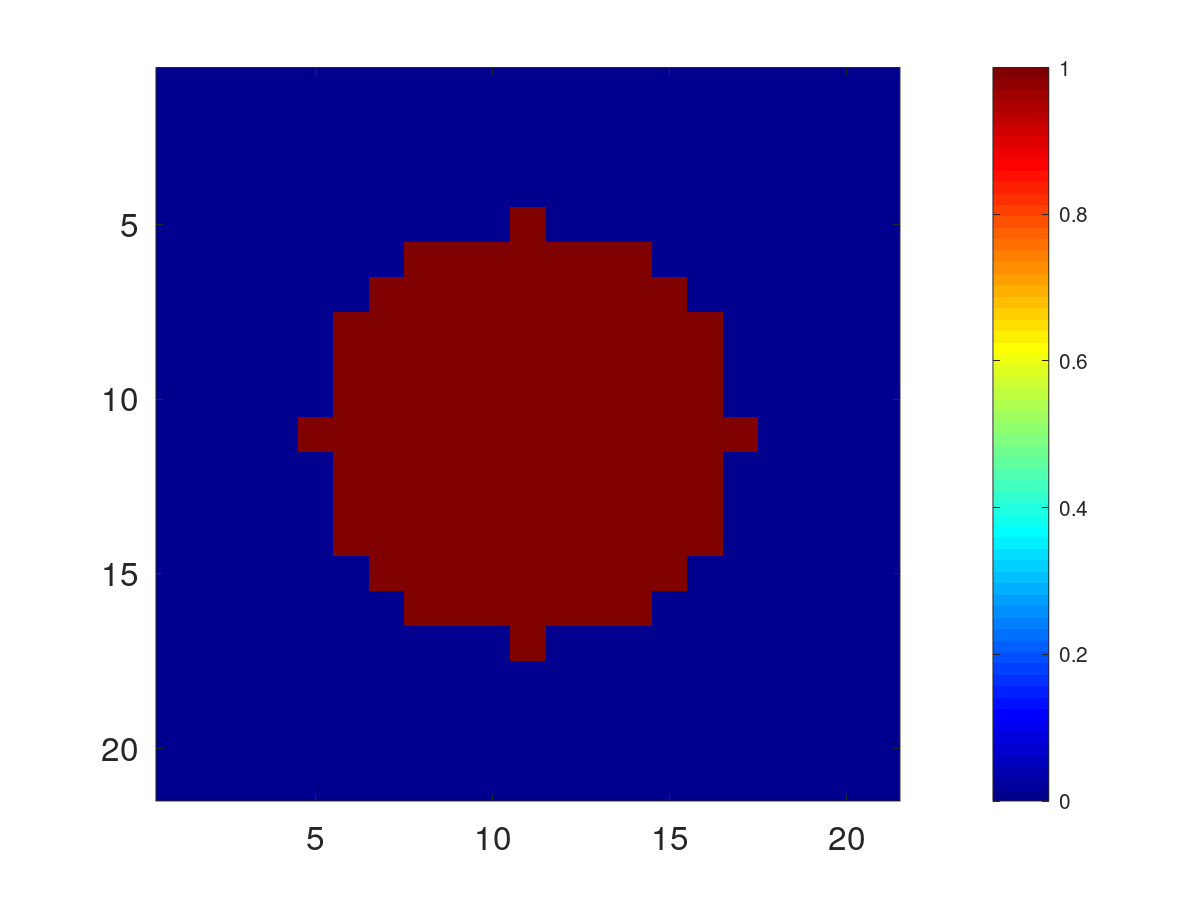
Pds::Matrix Kernel=Pds::Kernel2D::GaussianSigmaFit(6,10);
| [in] | rm | Valor del radio . Obligatoriamente  . . |
| [in] | r | Valor para formar el tamaño del filtro  . . |
. | Pds::Matrix Pds::Kernel2D::GaussianDiff | ( | unsigned int | k, |
| double | Sigma1 = 1.0, |
||
| double | Sigma2 = 1.2 |
||
| ) |
Retorna un filtro diferencia de Gaussiano discreto.
![\[
G_{ij}=
\frac{exp{\left(-{\frac {(i-k)^{2}+(j-k)^{2}}{2\sigma_1^{2}}}\right)}}{2\pi \sigma_1^{2}} -
\frac{exp{\left(-{\frac {(i-k)^{2}+(j-k)^{2}}{2\sigma_2^{2}}}\right)}}{2\pi \sigma_2^{2}} ;
0\leq i,j< (2k+1)
\]](form_196.png)
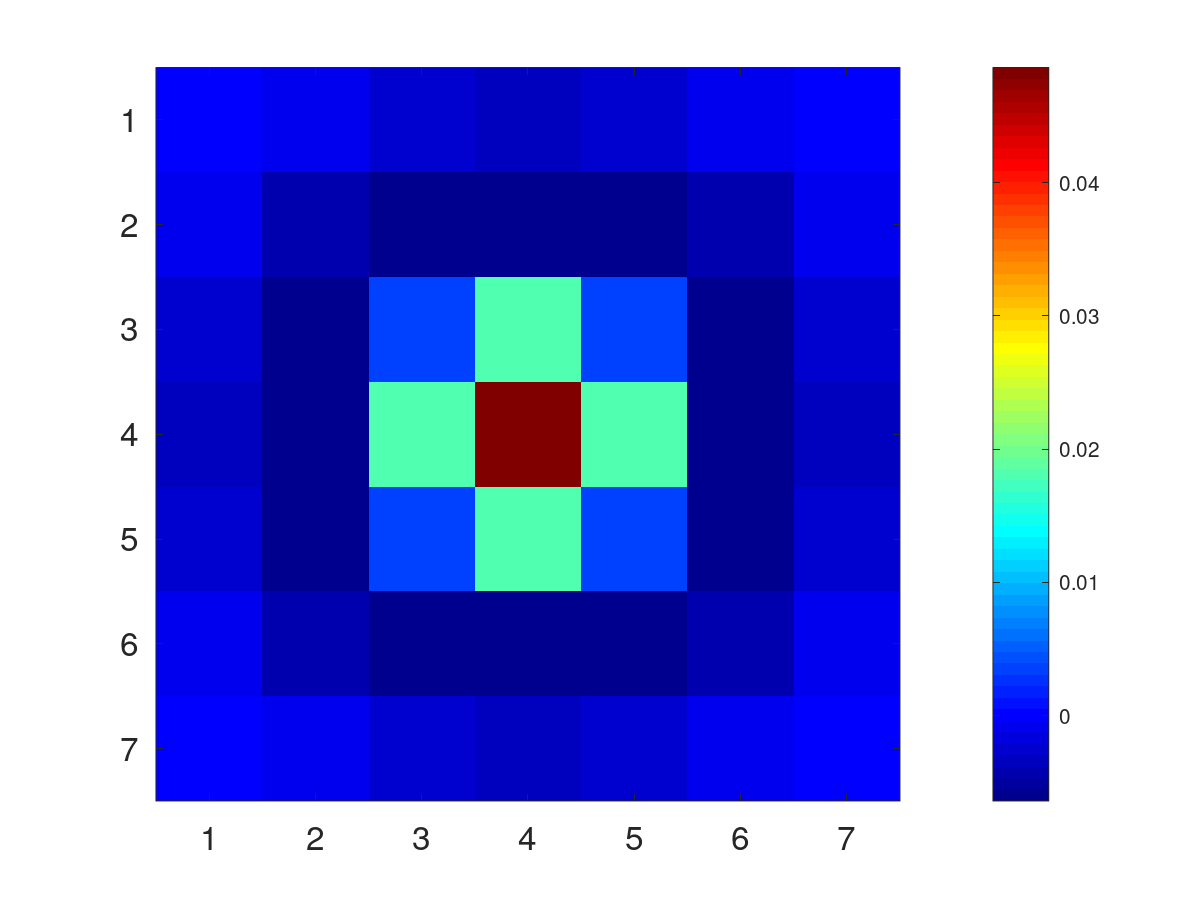
Pds::Matrix Kernel=Pds::Kernel2D::GaussianDiff(3);
| [in] | k | Valor para formar el tamaño del filtro . |
| [in] | Sigma1 | parámetro del filtro gaussiano. |
| [in] | Sigma2 | parámetro del filtro gaussiano. |
| Pds::Matrix Pds::Kernel2D::Gabor | ( | unsigned int | L, |
| double | Vmax = 6.0, |
||
| double | Sigma = 5.5, |
||
| double | Theta = Pds::Ra::Pi/4, |
||
| double | Lambda = 4.0, |
||
| double | Psi = 0.0 |
||
| ) |
Retorna un kernel Gabor.
![\[
\mathbf{A}\equiv [a(i,j)]
\]](form_197.png)
![\[
-Vmax\leq x\leq Vmax,\qquad -Vmax\leq y\leq Vmax
\]](form_198.png)
![\[
x'=x\cos \theta +y\sin \theta, \qquad y'=-x\sin \theta +y\cos \theta
\]](form_199.png)
![\[
Gabor(x,y;\lambda,\theta,\psi,\sigma) =
\exp\left(-\frac{x'^2+y'^2}{2\sigma^2}\right)\cos\left(2\pi\frac{x'}{\lambda}+\psi\right)
\]](form_200.png)

Pds::Matrix Kernel=Pds::Kernel2D::Gabor(49);
| [in] | L | El numero de lineas ou colunas de la matriz. |
| [in] | Vmax | Valor máximo de x e y. |
| [in] | Sigma | Desvio de la gausiana. |
| [in] | Theta | Angulo  de giro en 2D. de giro en 2D. |
| [in] | Lambda | Valor  inverso de la frecuencia de cosenoide. inverso de la frecuencia de cosenoide. |
| [in] | Psi | Desfasaje  de la cosenoide. de la cosenoide. |
| Pds::Matrix Pds::Kernel2D::qGabor | ( | unsigned int | L, |
| double | Vmax = 6.0, |
||
| double | q = 0.1, |
||
| double | Sigma = 5.5, |
||
| double | Theta = Pds::Ra::Pi/4, |
||
| double | Lambda = 4.0, |
||
| double | Psi = 0 |
||
| ) |
Retorna un kernel qGabor.
![\[
Gabor(x,y;q,\lambda,\theta,\psi,\sigma) =
exp_q\left(-\frac{x'^2+y'^2}{2\sigma^2}\right)\cos\left(2\pi\frac{x'}{\lambda}+\psi\right)
\]](form_202.png)
Pds::Matrix Kernel=Pds::Kernel2D::qGabor(49);
| [in] | L | El numero de lineas ou colunas de la matriz. |
| [in] | Vmax | Valor máximo de x e y. |
| [in] | q | Parámetro tsallis de la q-exponential, Pds::qExp(). |
| [in] | Sigma | Desvio de la gausiana. |
| [in] | Theta | Angulo de giro en 2D. |
| [in] | Lambda | Valor inverso de la frecuencia de cosenoide. |
| [in] | Psi | Desfasaje de la cosenoide. |
| Pds::Matrix Pds::Kernel2D::SobelH | ( | void | ) |
Retorna un kernel Sobel horizontal ([4] pp. 126).
![\[S_h\equiv
\left[
\begin{matrix}
-1 & -2 & -1\\
0 & 0 & 0\\
1 & 2 & 1\\
\end{matrix}
\right]
\]](form_203.png)
Pds::Matrix Kernel=Pds::Kernel2D::SobelH();
| Pds::Matrix Pds::Kernel2D::SobelV | ( | void | ) |
Retorna un kernel Sobel vertical ([4] pp. 126).
![\[S_h\equiv
\left[
\begin{matrix}
-1 & 0 & 1\\
-2 & 0 & 2\\
-1 & 0 & 1\\
\end{matrix}
\right]
\]](form_204.png)
Pds::Matrix Kernel=Pds::Kernel2D::SobelV();
| Pds::Matrix Pds::Kernel2D::PrewittH | ( | void | ) |
Retorna un kernel Prewitt horizontal ([4] pp. 121-122).
![\[P_h\equiv
\left[
\begin{matrix}
1 & 1 & 1\\
0 & 0 & 0\\
-1 & -1 & -1\\
\end{matrix}
\right]
\]](form_205.png)
Pds::Matrix Kernel=Pds::Kernel2D::PrewittH();
| Pds::Matrix Pds::Kernel2D::PrewittV | ( | void | ) |
Retorna un kernel Prewitt vertical ([4] pp. 121-122).
![\[P_h\equiv
\left[
\begin{matrix}
1 & 0 & -1\\
1 & 0 & -1\\
1 & 0 & -1\\
\end{matrix}
\right]
\]](form_206.png)
Pds::Matrix Kernel=Pds::Kernel2D::PrewittV();
| Pds::Matrix Pds::Kernel2D::Laplacian5P | ( | void | ) |
Retorna un operador Laplace discreto.
Las aproximaciones del Laplaciano, obtenidas por el método de diferencias finitas o por el método de elementos finitos, también pueden llamarse Laplacianos discretos. El laplaciano en dos dimensiones se puede aproximar utilizando el five-point stencil finite-difference method ([3] pp. 61), lo que resulta en
![\[
\frac{\partial^2f(x,y)}{\partial x^2} + \frac{\partial^2f(x,y)}{\partial y^2}
\equiv
\Delta f(x,y)
\]](form_207.png)
![\[
\Delta f(x,y)\approx \frac {f(x-h,y)+f(x+h,y)+f(x,y-h)+f(x,y+h)-4f(x,y)}{h^{2}},
\]](form_208.png)
![\[\Delta \equiv L_5 =
\left[
\begin{matrix}
0 & 1 & 0\\
1 & -4 & 1\\
0 & 1 & 0\\
\end{matrix}
\right]
\]](form_209.png)
| Pds::Matrix Pds::Kernel2D::Laplacian9P | ( | void | ) |
Retorna un operador Laplace discreto.
Las aproximaciones del Laplaciano, obtenidas por el método de diferencias finitas o por el método de elementos finitos, también pueden llamarse Laplacianos discretos. El laplaciano en dos dimensiones se puede aproximar utilizando el nine-point stencil finite-difference method ([3] pp. 64), lo que resulta en
![\[
\begin{array}{lll}
\Delta f(x,y) &\approx& \frac {4f(x-h,y)+4f(x+h,y)+4f(x,y-h)+4f(x,y+h)}{6 h^{2}}\\ \\
~ &~&+\frac {f(x-h,y-h)+f(x+h,y-h)+ f(x-h,y+h)+f(x+h,y+h)}{6 h^{2}}\\ \\
~ &~&-\frac {20f(x,y)}{6 h^{2}}\\
\end{array}
\]](form_210.png)
![\[\Delta \equiv L_9 = \frac{1}{6}
\left[
\begin{matrix}
1 & 4 & 1\\
4 & -20 & 4\\
1 & 4 & 1\\
\end{matrix}
\right]
\]](form_211.png)
| Pds::Matrix Pds::Kernel2D::Mean | ( | unsigned int | L | ) |
Retorna un kernel Mean.
![\[Mean\equiv \frac{1}{L^2}
\left[
\begin{matrix}
1 & 1 & ... & 1\\
1 & 1 & ... & 1\\
\vdots & \vdots & ... & \vdots\\
1 & 1 & ... & 1\\
\end{matrix}
\right]
\]](form_212.png)
Pds::Matrix Kernel=Pds::Kernel2D::Mean(5);







 1.9.4
1.9.4